

Tuomo Moilanen
Gerente para Cooperação com Empresas Florestais e Sistemas de Informações da Ponsse
Op-CP-47
O uso efetivo do método de colheita cut-to-lenght
Os principais métodos de colheita mecanizada são os de “corte no comprimento” (cut-to-length – CTL) e o “árvore completa” (FT – full-tree). No método CTL, o harvester abate a árvore e processa em diferentes medidas. É típico para o método CTL o processamento de diferentes dimensões de toras, que são chamadas sortimentos, derivados de uma mesma árvore. Os tipos de sortimentos mais comuns são para uso de serraria, mourões, madeira para polpa de celulose e também biomassa – que geralmente é retirada do topo da árvore. Nas plantações de eucalipto, é muito comum produzir apenas madeira de polpa de celulose.
O método de colheita CTL é muito efetivo em custo, seguro e orientado para a qualidade, o que permite a alta produtividade em várias condições, caso a colheita seja adequadamente planejada, o operador, qualificado e o método de trabalho correto seja utilizado. O mais comum em todo o mundo é a combinação de um harvester e um forwarder no mesmo local de colheita. No entanto, se o local de colheita é muito grande, faz sentido organizar a equipe para que a relação harvester para forwarder não seja 1:1, mas, por exemplo, 3 harvesters para cada 2 forwarders.
O método de colheita CTL é muito efetivo em custo, seguro e orientado para a qualidade, o que permite a alta produtividade em várias condições, caso a colheita seja adequadamente planejada, o operador, qualificado e o método de trabalho correto seja utilizado. O mais comum em todo o mundo é a combinação de um harvester e um forwarder no mesmo local de colheita. No entanto, se o local de colheita é muito grande, faz sentido organizar a equipe para que a relação harvester para forwarder não seja 1:1, mas, por exemplo, 3 harvesters para cada 2 forwarders.
Planejamento do local de colheita e operação:
A colheita também precisa ser planejada para que o trabalho seja seguro, produtivo e não tenha qualquer dano ao meio ambiente. Em operações eficazes com harvester e forwarder, as máquinas se deslocam de acordo com o terreno, e todos os movimentos da máquina são minimizados. As estradas dentro do talhão precisam ser planejadas nas áreas mais elevadas, para que a máquina seja conduzida diretamente para cima ou para baixo. O principal item a ser pensado e definido é onde as toras serão mais fáceis de serem transportadas.
Consequentemente, é mais sábio fazer várias pilhas pequenas ao lado da estrada em vez de uma pilha grande. O harvester de pneus do método CTL e o forwarder podem operar, sem problemas, em terrenos planos e com inclinações até 27 graus. Se a operação for executada em áreas acidentadas, o harvester e o forwarder podem trabalhar em inclinações maiores do que 27 graus, mas é preciso garantir uma rota segura no caminho de volta para o topo (estrada). O harvester pode operar normalmente enquanto se desloca subindo, mas, caso isso não seja possível, a máquina precisa ser equipada com o guincho de tração sincronizada. Em encostas extremamente íngremes, é necessário usar o guincho sincronizado, tanto para o harvester quanto para o forwarder.
Consequentemente, é mais sábio fazer várias pilhas pequenas ao lado da estrada em vez de uma pilha grande. O harvester de pneus do método CTL e o forwarder podem operar, sem problemas, em terrenos planos e com inclinações até 27 graus. Se a operação for executada em áreas acidentadas, o harvester e o forwarder podem trabalhar em inclinações maiores do que 27 graus, mas é preciso garantir uma rota segura no caminho de volta para o topo (estrada). O harvester pode operar normalmente enquanto se desloca subindo, mas, caso isso não seja possível, a máquina precisa ser equipada com o guincho de tração sincronizada. Em encostas extremamente íngremes, é necessário usar o guincho sincronizado, tanto para o harvester quanto para o forwarder.
Utilizando o guincho, as máquinas conseguem operar com até 40 graus de inclinação. Observe que o guincho sincronizado não é um equipamento de segurança, mas sim um equipamento para auxiliar a máquina a subir de volta a colina. É importante planejar ainda a localização das pilhas de madeira na beira do talhão para que sejam fáceis de alcançar e descarregar, mantendo o trabalho do forwarder seguro.
A área de colheita precisa ser dividida em seções, de modo que a distância de transporte seja a mais curta. Dessa forma, é possível não só tornar o trabalho mais eficaz, mas também reduzir a compactação do solo, que é tipicamente maior próximo das pilhas.
Métodos de trabalho:
O harvester construído especificamente para a colheita de madeira em conjunto com um operador habilidoso pode alterar o método de trabalho de acordo com as condições. Os principais métodos de operação no corte raso com o harvester CTL são a colheita convencional, a colheita longitudinal e a colheita por setor, ou "espinha de peixe".
 A colheita transversal é adequada para estradas ou áreas especiais, como ao lado de linhas elétricas, perto das áreas protegidas, etc. A colheita longitudinal é muito apropriada para árvores grandes e para quando o operador precisa verificar cuidadosamente a qualidade das toras. Já o método setorial é útil na maioria das condições. Tanto os métodos de colheita longitudinal quanto os métodos de colheita setorial são métodos muito produtivos.
A colheita transversal é adequada para estradas ou áreas especiais, como ao lado de linhas elétricas, perto das áreas protegidas, etc. A colheita longitudinal é muito apropriada para árvores grandes e para quando o operador precisa verificar cuidadosamente a qualidade das toras. Já o método setorial é útil na maioria das condições. Tanto os métodos de colheita longitudinal quanto os métodos de colheita setorial são métodos muito produtivos.
A colheita transversal é adequada para estradas ou áreas especiais, como ao lado de linhas elétricas, perto das áreas protegidas, etc. A colheita longitudinal é muito apropriada para árvores grandes e para quando o operador precisa verificar cuidadosamente a qualidade das toras. Já o método setorial é útil na maioria das condições. Tanto os métodos de colheita longitudinal quanto os métodos de colheita setorial são métodos muito produtivos.
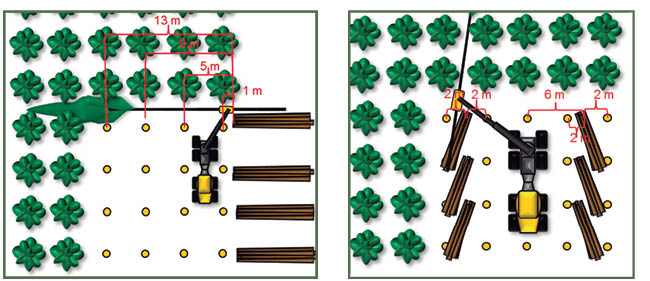
Vejamos o exemplo: há um local de colheita onde as árvores estão em fileiras e há 280 m³/hectare. No caso de um operador usar método transversal e colher 4 linhas ao mesmo tempo e com distância de linha para linha de 4 metros, isso significa que a distância de dois eitos é de 16 metros. Isso dá um resultado de 0,385 toneladas de madeira em cada metro do eito, assumindo que 1 m³ é 860 kg. Com um forwarder em que a capacidade de carga é de 20 toneladas, é possível obter uma carga completa em 52 metros em média de percurso percorrido.
No caso B, o mesmo operador usa o método setorizado e colhe 5 fileiras ao mesmo tempo, na mesma condição que no caso A. A distância dos eitos é, agora, de 20 metros, e isso significa que há 0,482 toneladas de madeira em cada metro do eito. Com um forwarder de 20 toneladas, é necessário percorrer apenas 42 metros para uma carga completa. Nesse caso, o operador do harvester B é mais eficaz porque ele precisa dirigir 25% menos hectares do que no caso A.
No caso B, o mesmo operador usa o método setorizado e colhe 5 fileiras ao mesmo tempo, na mesma condição que no caso A. A distância dos eitos é, agora, de 20 metros, e isso significa que há 0,482 toneladas de madeira em cada metro do eito. Com um forwarder de 20 toneladas, é necessário percorrer apenas 42 metros para uma carga completa. Nesse caso, o operador do harvester B é mais eficaz porque ele precisa dirigir 25% menos hectares do que no caso A.
Do ponto de vista do forwarder, o método do setor também é melhor porque a distância do ponto de gravidade central de cada feixe está mais próxima da linha central do forwarder. Portanto realizar a carga no método de setor é bem mais fácil do que no método transversal. No caso B, o harvester também é mais eficaz do que no caso A, pelo harvester fazer menos trabalho por árvore. Como isso é possível?
No caso A, o operador move a primeira árvore cerca de 1 metro do ponto de abate até o local da pilha, e a segunda árvore precisa ser movida 5 metros. No total do caso A, o operador movimenta 4 árvores, percorrendo cerca de 28 metros, que é de 7 metros por árvore em média. Já o operador B move a primeira árvore cerca de 6 metros, e o resto das 4 árvores são movidas com apenas 2 metros cada. No total, o operador B move 5 árvores em apenas 14 metros, sendo inferior a 3 metros por árvore. O operador do método de setor faz menos trabalho porque ele move os troncos 50% a menos do que no método transversal. Também o movimento do cabeçote do harvester é minimizado.
O método de colheita por setor fornece alta eficiência de colheita porque:
• o movimento em cada árvore é bastante curto (o movimento da grua é minimizado no processo);
• o movimento da grua de uma árvore a outra é bem curto;
• podem ser utilizados movimentos lineares rápidos da grua;
• o balanço da máquina é melhorado durante a movimentação da grua no método setor, assim o operador consegue ser mais rápido;
• menos deslocamento com o harvester, pois a máquina consegue colher mais árvores parada em um mesmo ponto.
• o movimento em cada árvore é bastante curto (o movimento da grua é minimizado no processo);
• o movimento da grua de uma árvore a outra é bem curto;
• podem ser utilizados movimentos lineares rápidos da grua;
• o balanço da máquina é melhorado durante a movimentação da grua no método setor, assim o operador consegue ser mais rápido;
• menos deslocamento com o harvester, pois a máquina consegue colher mais árvores parada em um mesmo ponto.
Requisitos da máquina e do operador para métodos de colheita eficazes:
A maioria dos harvesters de pneus são projetados para métodos de trabalho eficazes. Essas máquinas possuem gruas poderosas localizadas de modo que a visibilidade da cabine seja boa em ambos os lados e em toda a área de trabalho. É necessário que haja suficiente potência do motor e potência hidráulica na máquina de colheita. Para trabalhar em terrenos com inclinações muito íngremes, o harvester e o forwarder precisam ser capazes de ser equipados com o guincho de tração sincronizada.
Os operadores precisam ser treinados em diferentes tipos de métodos de colheita, de modo que eles sejam capazes de escolher o método mais eficaz e adequado para cada tipo de área. O operador com grande hábilidade pode processar algumas árvores grandes no início do eito e mudar logo após para o método de setor quando entrar um pouco mais no talhão. Próximo da estrada ou nos limites dos talhões, ele muda para o método transversal. Um operador profissional sabe a importância de um método eficaz e o porquê de eles serem mais eficientes para cada área da colheita, exigindo menos da máquina, tornando muito mais produtivo e rentável para os proprietários de máquinas.